






Isaac Simを使ってみたかったのですが、高性能なPCがないため、格安でクラウドのGPU環境が使えるVast.aiを利用して、NICE DCVでリモートデスクトップをしてみました。
ChatGPTに聞きながらやりましたが、大分苦戦したため、やり方をまとめたいと思います。
\生成AIにおすすめPC/

\操作性抜群のおすすめマウス/

Isaac Simとは
Isaac Simは、NVIDIAが開発したロボット用シミュレーション環境です。
物理エンジンとフォトリアルな描画により、現実に近い環境でロボットの動作やAIを検証することができます。
ROS 2と連携し、自律移動や認識などの開発・テストを効率化し、実機を使わず安全かつ低コストで実験できるのが特徴です。
Vast.aiとは
Vast.aiは、GPU計算リソースを安価に利用できるマーケット型クラウドサービスです。
個人やデータセンターが提供する余剰GPUを仲介し、ユーザは用途に応じて最適な環境を選択・利用できます。
Dockerや仮想環境で迅速にAI・機械学習の処理を実行でき、スケーラブルかつコスト効率に優れるのが特徴です。
Vast.aiの始め方
登録から作成したインスタンスへの接続までを順番に解説します。
Step1:アカウント作成
ブラウザで下記サイトを開きます。
「Login」をクリックします。
Googleアカウントで登録できます。
Step2:残高をチャージ
GPUは従量課金なので、事前にチャージします。
Billingページへ行き、Add Cardでクレジットカードを登録します。
Add Creditボタンで表示されたウィンドウで、チャージする金額を選択し、登録したクレジットカードを選択して表示されたウィンドウ内のAdd Creditボタンを押すとチャージできます。
とりあえず10$でいいと思います。
大体、今回作成したインスタンスを稼働中で1時あたり0.4~0.5$くらいかかります。
インスタンスを停止しても、インスタンスを削除するまではストレージの料金で1時間あたり0.03$くらいかかります。
Step3:インスタンス起動
Templatesのページを開き右側にあるTagsの中のVMを選択します。
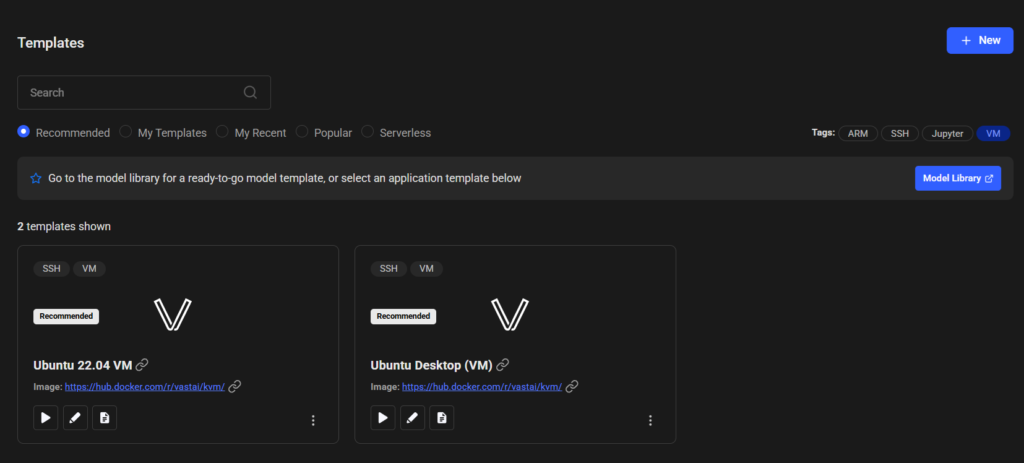
Ubuntu 22.04 VMのEditボタンを押して、編集を行います。
以下の画像のように編集します。
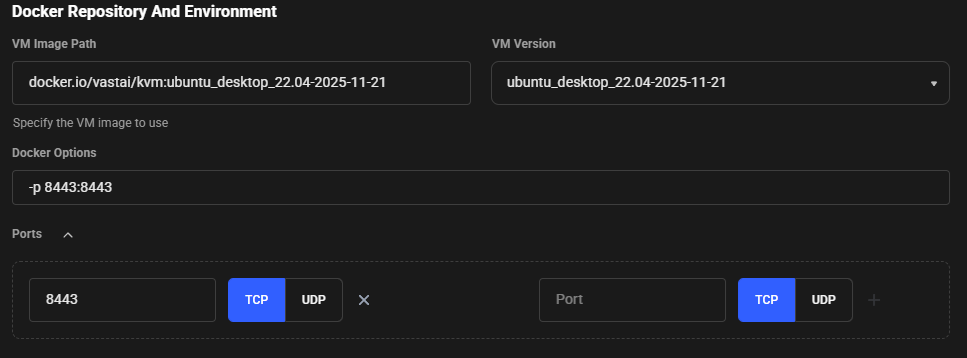
Save &Useボタンを押すとテンプレートが選択された状態になるので、Searchページで借りたいGPUを探します。
RTX 3090やRTX 4090などのVRAM24GB以上のものがいいと思います。
いいのがあったらRentボタンを押します。
そうするとInsancesページに選んだもののインスタンスが追加されます。
Step4:サーバに接続
Instancesページの以下の左端のボタンの名称が「Connect」になった状態で押すと、SSH接続するためのコマンドが表示されます。

以下のようなコマンドです。
| ssh root@IPアドレス -p ポート番号 |
接続にはMobaXtermを使用しました。
SSH鍵に関しては以下のサイトを参考にしました。
URL:https://web.kudpc.kyoto-u.ac.jp/manual/ja/login/mobaxterm
Step5:使い終わったら停止
起動中はずっと課金されるので、停止させます。
ただ、インスタンスを停止させただけだと、ストレージの料金はかかるので注意してください。
Isaac Simの導入手順
ここでは、Vast.ai上でNVIDIA Isaac Simを確実に動かす方法をまとめます。
Step 1:Vast.aiのインスタンス接続
前章で説明したように接続してください。
Step 2:基本環境を整える
接続したターミナルで以下を実行してください。
|
1 |
apt update && apt upgrade -y |
処理が終わったら以下のReboot instanceボタンを押して再起動してください。

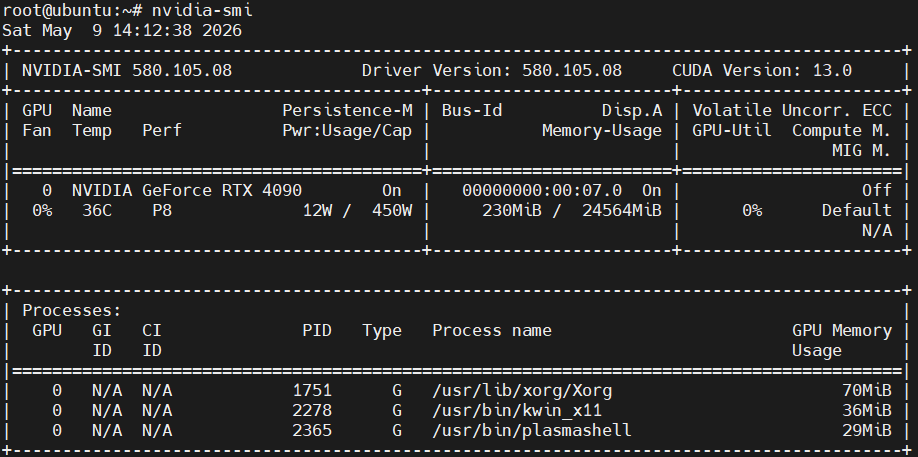
Step 3:GPU確認
以下のコマンドを実行してください。
|
1 |
nvidia-smi |
以下のように表示されれば問題ありません。
Step 4:GUI環境のための設定
環境変数を設定します。
|
1 |
export DISPLAY=:0 |
|
1 |
export __GLX_VENDOR_LIBRARY_NAME=nvidia |
|
1 |
export OMNI_DISABLE_EXTENSIONS="omni.kit.window.movie_capture" |
元からあるユーザにパスワードを設定します。
|
1 |
passwd user |
以下のコマンドを実行してxorg.confファイルを編集します。
|
1 |
nano /etc/X11/xorg.conf |
以下のように編集します。
| Section “Device” Identifier “Device0” Driver “nvidia” Option “AllowEmptyInitialConfiguration” “True” Option “ConnectedMonitor” “DFP-0” VendorName “NVIDIA Corporation” EndSection Section “Screen” Identifier “Screen0” Device “Device0” Monitor “Monitor0” DefaultDepth 24 Option “AllowEmptyInitialConfiguration” “True” SubSection “Display” Depth 24 Modes “1920x1080_60” EndSubSection EndSection Section “ServerFlags” Option “DontVTSwitch” “True” Option “DontZap” “True” Option “AllowMouseOpenFail” “True” Option “AutoAddGPU” “False” EndSection |
Step 5:リモートデスクトップ
NICE DCVをインストールします。
| wget https://d1uj6qtbmh3dt5.cloudfront.net/2025.0/Servers/nice-dcv-2025.0-20103-ubuntu2204-x86_64.tgz tar -xvzf nice-dcv-*.tgz cd nice-dcv-2025.0-20103-ubuntu2204-x86_64 apt install -y ./nice-dcv-server_*.deb apt install -y ./nice-dcv-web-viewer_*.deb apt install -y ./nice-dcv-gl_*.deb |
以下のコマンドを実行してDCVサーバを起動します。
| systemctl enable dcvserver systemctl start dcvserver |
以下のコマンドを実行して、dcv.confファイルを編集します。
| nano /etc/dcv/dcv.conf |
[session-management]と[display]のところを以下のように編集します。
| [session-management] create-session = true enable-gl-in-virtual-sessions = “default-on” [display] enable-gl=true gl-displays=[“0”] egl-device-id=0 |
インスタンスを再起動します。
再度接続して、以下のコマンドを実行します。
|
1 2 |
dcv close-session console dcv create-session console --type=console --owner user |
以下コマンドでセッションがちゃんと作成されたか確認します。
| dcv list-sessions |
上手く作成できていればブラウザで以下のURLを入力してください。
| https://IPアドレス:ポート番号 |
ここでのポート番号はInstancesページの作成したインスタンスの項目内の、IPアドレスが書かれているところをクリックすると表示されるIP & Port Info:ウィンドウ内のOpen Ports:のところでIPアドレス:ポート番号 -> 8443/tcpで書かれているポート番号を使用してください。
8443ではないので注意してください。
以下のようなログイン画面がでれば成功です。
Step 6:Isaac Simインストール
フォルダ作成して権限を変更します。
| mkdir -p /opt/isaacsim chown -R user:users /opt/isaacsim chmod -R u+rwX /opt/isaacsim chown -R user:users /opt/isaacsim/kit |
以下のコマンドでIsaac Simをインストールします。
| cd /opt/isaacsim wget https://download.isaacsim.omniverse.nvidia.com/isaac-sim-standalone-5.1.0-linux-x86_64.zip unzip isaac-sim-standalone-5.1.0-linux-x86_64.zip rm isaac-sim-standalone-5.1.0-linux-x86_64.zip ./post_install.sh |
Step 7:起動
以下のコマンドで起動します。
| cd /opt/isaacsim ./isaac-sim.sh |
上記のコマンドで起動はできましたが、その後の操作で、落ちたりしたので、次のコマンドで起動しました。
|
1 2 3 4 5 |
./isaac-sim.sh \ --reset-user \ --/renderer/multiGpu/enabled=false \ --/renderer/activeGpu=0 \ --/physics/cudaDevice=0 |
–reset-userは上手くいった後はいらないかもしれません。
|
1 2 3 4 |
./isaac-sim.sh \ --/renderer/multiGpu/enabled=false \ --/renderer/activeGpu=0 \ --/physics/cudaDevice=0 |
以下のような画面が表示されれば成功です。
Isaac Simの操作(記事編集中)
Isaac Simには3種類の操作方法がありますが、その一つではVSコードを起動してPythonプログラムを編集して行うものがあります。
そのため、まずはVSコードのインストールを行います。
VSコード
apt更新
| apt update apt install -y wget gpg apt-transport-https |
Microsoftキー追加
|
1 2 |
wget -qO- https://packages.microsoft.com/keys/microsoft.asc | gpg --dearmor > packages.microsoft.gpg install -D -o root -g root -m 644 packages.microsoft.gpg /etc/apt/keyrings/packages.microsoft.gpg |
リポジトリ追加
|
1 |
echo "deb [arch=amd64 signed-by=/etc/apt/keyrings/packages.microsoft.gpg] https://packages.microsoft.com/repos/code stable main" > /etc/apt/sources.list.d/vscode.list |
インストール
| apt update apt install -y code |
ROS2
|
1 2 3 4 5 6 7 8 |
sudo apt update sudo apt install -y curl gnupg lsb-release sudo curl -sSL https://raw.githubusercontent.com/ros/rosdistro/master/ros.key \ -o /usr/share/keyrings/ros-archive-keyring.gpg echo "deb [arch=$(dpkg --print-architecture) signed-by=/usr/share/keyrings/ros-archive-keyring.gpg] http://packages.ros.org/ros2/ubuntu jammy main" \ | sudo tee /etc/apt/sources.list.d/ros2.list |
|
1 |
sudo apt install -y ros-humble-desktop |
|
1 2 |
echo "source /opt/ros/humble/setup.bash" >> ~/.bashrc source ~/.bashrc |
|
1 |
ros2 topic list |
|
1 |
source /opt/ros/humble/setup.bash |
スタンドアロンアプリケーション
|
1 2 3 4 5 6 7 8 9 |
from isaacsim import SimulationApp simulation_app = SimulationApp( { "headless": False, # headless=True でGUI無しでも実行可能 "active_gpu": 0, "physics_gpu": 0, "multi_gpu": False, } ) |
まとめ
高性能なPCを持っていなくても比較的安い値段でクラウド環境を作ってIsaac Simを起動することができました。
ロボットに関連した他の記事
ROS2の記事










コメント
コメント一覧 (1件)
All the best